
|
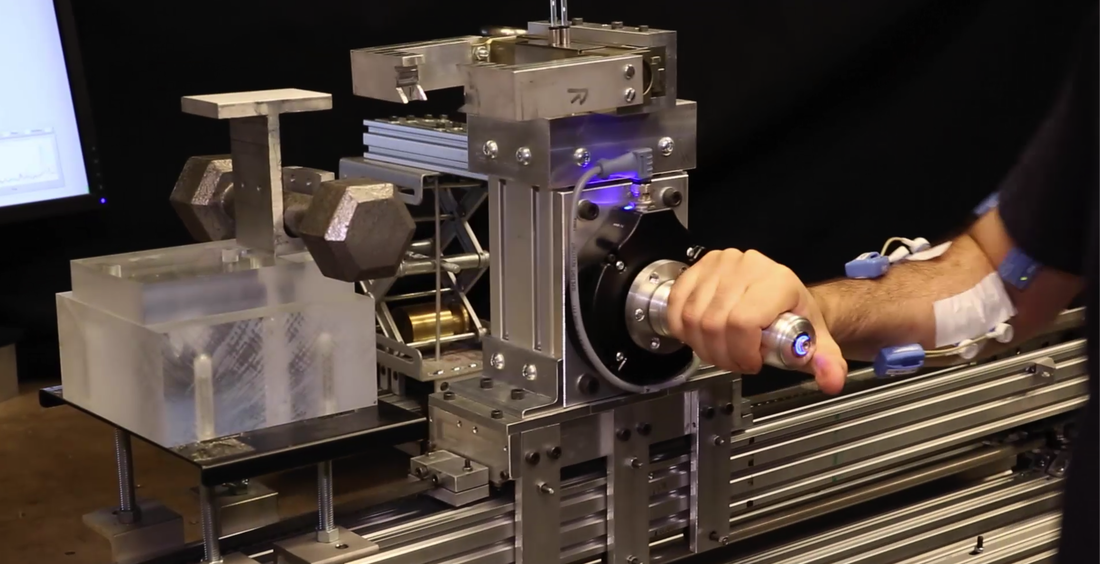
Understanding Neuromuscular Adaptations in Human-Robot Physical Interaction for Adaptive Robot Co-Workers
In this project, physiological data was gathered from gaze, surface EMG, and haptic sensors in order to estimate the human operators behavioral intent during physical operation of telerobots. Using a combination of data fusion and machine learning approaches, including our own novel layered HMM, we were able to achieve high precisions in both intent estimation and prediction |

|
Models, Metrics, and a Mathematics of Interactional Trust for Humans and
Automation (Ph.D. Dissertation) This dissertation focuses on how HRI can understand, model, and measure trust in ways that both capture it in all its complexity, with its antecedents and correlates, as well as how trust expectations translate into actual decisions. We do this by bringing together trust research from many fields combining HRI trust with game theory, social psychology, and management and information science. |


SunStation
The SunStation is a green electric vehicle charger and the ideal backup system for home owners and businesses. The SunStation solar panels provide clean power during the day. The advanced Li-ion battery bank releases it at night. Our cutting-edge panels even collect energy during cloudy days, so you always have a charge. Patent Pending.
The SunStation is a green electric vehicle charger and the ideal backup system for home owners and businesses. The SunStation solar panels provide clean power during the day. The advanced Li-ion battery bank releases it at night. Our cutting-edge panels even collect energy during cloudy days, so you always have a charge. Patent Pending.
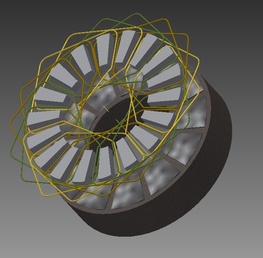
Halbach Reaction Wheel Assembly for CubeSats
The Halbach RWA is a dual-rotor permanent magnet axial-flux design. An iron-less rotor and non-magnetic stator eliminate cogging, torque, magnetic hysteresis, permeance, and eddy current losses. By using a Halbach array configuration, leakage flux is reduced and an almost perfect sinusoidal flux distribution is achieved. Patent Pending.
The Halbach RWA is a dual-rotor permanent magnet axial-flux design. An iron-less rotor and non-magnetic stator eliminate cogging, torque, magnetic hysteresis, permeance, and eddy current losses. By using a Halbach array configuration, leakage flux is reduced and an almost perfect sinusoidal flux distribution is achieved. Patent Pending.

Direct Fusion Drive (with PPPL)
The DFD, a compact aneutronic fusion engine will enable more challenging exploration missions in the solar system. This engine uses a deuterium-helium-3 reaction to produce fusion energy by employing a novel field-reversed magnetic field configuration (FRC). The FRC has a simple linear solenoidal coil configuration and uses an odd-parity rotating magnetic field for plasma heating. Waste heat generated from bremsstrahlung and synchrotron radiation is recycled to maintain the fusion temperature. The charged reaction products, augmented by additional propellant, are exhausted through a magnetic nozzle. For the papers, click here.
The DFD, a compact aneutronic fusion engine will enable more challenging exploration missions in the solar system. This engine uses a deuterium-helium-3 reaction to produce fusion energy by employing a novel field-reversed magnetic field configuration (FRC). The FRC has a simple linear solenoidal coil configuration and uses an odd-parity rotating magnetic field for plasma heating. Waste heat generated from bremsstrahlung and synchrotron radiation is recycled to maintain the fusion temperature. The charged reaction products, augmented by additional propellant, are exhausted through a magnetic nozzle. For the papers, click here.
Gas Refueling for the PFRC-2
Design of a refueling procedure for the Princeton Field Reversed Configuration 2. Simulated gas conductance in the device under high vacuum and took experimental data to verify results. Computational modeling to find control law using interpolation, regression analysis, and neural networks. Experimented with gas puffing for plasma oscillation stabilization.
Design of a refueling procedure for the Princeton Field Reversed Configuration 2. Simulated gas conductance in the device under high vacuum and took experimental data to verify results. Computational modeling to find control law using interpolation, regression analysis, and neural networks. Experimented with gas puffing for plasma oscillation stabilization.

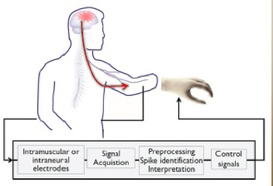
Fully-Implantable Neural Electrode Interface for Control and Energy
(FINE-ICE)
Design of a device that successfully integrates current intrafascicular neural electrode devices with the Integrated Neural Interface (INI) and ultra-capacitor power storage. Investigation of the biocompatibility of such a system including its ability to directly control the neuromuscular system. The device is also low maintenance, flexible, and cost effective.
(FINE-ICE)
Design of a device that successfully integrates current intrafascicular neural electrode devices with the Integrated Neural Interface (INI) and ultra-capacitor power storage. Investigation of the biocompatibility of such a system including its ability to directly control the neuromuscular system. The device is also low maintenance, flexible, and cost effective.

Subaru Coronagraphic Extreme Adaptive Optics Project (SCExAO)
Equipping the Subaru Telescope with a system for direct imaging of exoplanets and protoplanetary disks. The system benefits from the most recent development in coronagraphy, adaptive optics and detector technologies, many of which have been pioneered by our group at Subaru Telescope. This will be the first coronagraphic system truly optimized for detecting planets at very small angular separation. This optimization is essential to the success of any exoplanet direct detection program. The ability to probe the inner part of planetary systems will prove invaluable in our attempt at understanding their formation and evolution.
Equipping the Subaru Telescope with a system for direct imaging of exoplanets and protoplanetary disks. The system benefits from the most recent development in coronagraphy, adaptive optics and detector technologies, many of which have been pioneered by our group at Subaru Telescope. This will be the first coronagraphic system truly optimized for detecting planets at very small angular separation. This optimization is essential to the success of any exoplanet direct detection program. The ability to probe the inner part of planetary systems will prove invaluable in our attempt at understanding their formation and evolution.
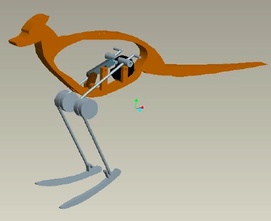
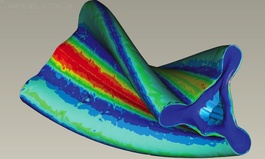
Roo’bot: A Study in Hopping and Jumping for Biomimetic Locomotion
(Senior Thesis)
Animals have evolved diverse and efficient methods for locomotion. This study investigated the dynamics of such motion so that we can take advantage of them. While much of the current theoretical work on the dynamics of locomotion has focused on walking and running gaits, here jumping and hopping are analyzed as powerful and efficient techniques for movement. After reviewing the current models and mechanisms of hopping, a promising dynamic model was investigated to further explore the real-world implications of such movement. Finally, a minimally-actuated mechanical hopper was designed in order to reflect the results of our theory as well as help further our understanding of how such theoretical systems operate in practice.
(Senior Thesis)
Animals have evolved diverse and efficient methods for locomotion. This study investigated the dynamics of such motion so that we can take advantage of them. While much of the current theoretical work on the dynamics of locomotion has focused on walking and running gaits, here jumping and hopping are analyzed as powerful and efficient techniques for movement. After reviewing the current models and mechanisms of hopping, a promising dynamic model was investigated to further explore the real-world implications of such movement. Finally, a minimally-actuated mechanical hopper was designed in order to reflect the results of our theory as well as help further our understanding of how such theoretical systems operate in practice.
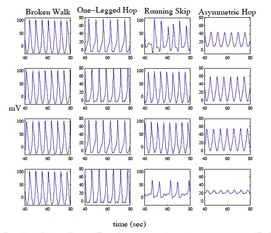
Simulation of CPGs for Bipedal Locomotion
Exploration of two methods (Hodgkin-Huxley and FitzHugh-Nagumo) for CPG modeling and determination of compatibility with natural bipedal gaits. Determination of full behavioral aspects of the models and analysis of key parameters for hop generation.
Exploration of two methods (Hodgkin-Huxley and FitzHugh-Nagumo) for CPG modeling and determination of compatibility with natural bipedal gaits. Determination of full behavioral aspects of the models and analysis of key parameters for hop generation.

Facial Recognition Using Neural Networks: A Hybrid Approach
Combining holistic and local approaches to the facial recognition problem by using a self-organizing map/radial basis network hybrid. A 99% effective recognition rate was achieved under a variety of lighting and poses. This also shows the power of unsupervised learning.
Combining holistic and local approaches to the facial recognition problem by using a self-organizing map/radial basis network hybrid. A 99% effective recognition rate was achieved under a variety of lighting and poses. This also shows the power of unsupervised learning.
Project Burnout: Building a Supercharger
Design and construction of a roots type supercharger. The cost-effective design is ideal for the amateur market. Innovative use of HDPE and composites for the three-lobe rotors allow for ultra light-weight design. See engineering drawings.
Design and construction of a roots type supercharger. The cost-effective design is ideal for the amateur market. Innovative use of HDPE and composites for the three-lobe rotors allow for ultra light-weight design. See engineering drawings.
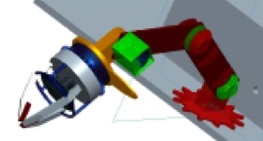
Design and Simulation of a One Inch Robot
This miniature robot arm fits into a one inch cube when stowed and could be used for a multitude of applications. It has the precision to pick-up grains of sand and the space to manipulate and orient a pen.
This miniature robot arm fits into a one inch cube when stowed and could be used for a multitude of applications. It has the precision to pick-up grains of sand and the space to manipulate and orient a pen.
High Contrast Imaging Laboratory
Designed and ran laser optics experiments with coronagraphs. Analyzed astronomical data for target optimization. Created experimental software simulations and researched neural networking technologies and their application to deformable mirrors. Evaluated deformable mirror control models linked to neural network processors with experimental data.
Designed and ran laser optics experiments with coronagraphs. Analyzed astronomical data for target optimization. Created experimental software simulations and researched neural networking technologies and their application to deformable mirrors. Evaluated deformable mirror control models linked to neural network processors with experimental data.
